毫米波雷达技术及相关使用芯片研究
时间: 2024-01-04 13:46:08 | 作者: 爱游戏最新官网
相比于低频射频频段,毫米波波长更短,能够得到更好的分辨率,其所需的天线尺寸也更小,有利于小型化。毫米波雷达在车载雷达、智能机器人、生物体征识别、手势识别等方面都有无法替代的优势。
在车载雷达方面,现今的汽车对安全性和智能性要求慢慢的升高,一辆高档车里集成了各种电子辅助系统,如泊车辅助、自主巡航、盲点检测、换道辅助、防撞预警、自主刹车等等。
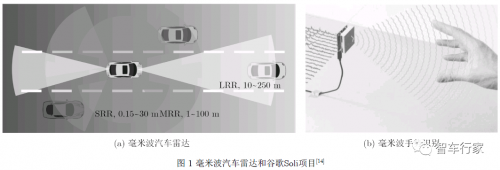
为了实现这些功能,车身要安设大量的传感器,感知车身四周 360º的环境。而且对传感器的工作范围、精度均有较高要求。现今的主流解决方案多采用 24 GHz 的雷达、图像传感器和若干个超声波传感器。这种方案成本高,精度和测距范围有限,典型的最小检测距离为 20 cm,对于 5 m 外的目标距离分辨率为 40 cm。一种更有潜力的方案是采用多个 79 GHz 的毫米波雷达替换掉超声波传感器和 24 GHz 雷达。
79 GHz 的毫米波雷达能轻松实现 10 cm 的最小检测距离和小于 5 cm 的距离分辨率。而且,毫米波雷达不需要对车身开孔,这对于汽车外观设计也更为有利。学术界、工艺界对毫米波车载雷达开展了大量的研究。手势识别是另一种毫米波雷达潜在的应用场景。如今主流的智能设备的人机交互方式是触屏,包括点、划、长按等等,在这种交互下,人手必须与设备直接接触。
毫米波雷达手势识别通过无线信号检测空中手势,人手不需要与接触屏幕,从而提供了新的交互维度。毫米波雷达手势识别的代表之一是美国谷歌公司开发的 Soli 芯片,如图 1 所示。该芯片发射毫米波雷达信号,捕捉手势的反射回波,将回波转换为包含距离和速度的时序信息,之后通过机器学习算法进行特征提取,识别,定位和追踪。
得益于毫米波雷达的高距离分辨率,该芯片可以准确地识别按钮、转转盘和滑动滑杆等手势操作。相比于基于光学的手势识别,毫米波雷达手势识别功耗低,且不受环境影响,可靠性更高。
本节将从系统组成、频段选择、测距原理和雷达分辨率 4 个方面介绍毫米波雷达的背景。
毫米波雷达系统最重要的包含天线、毫米波收发前端、数字信号处理和雷达控制电路,如图 2 所示。天线发射和接收电磁波信号,收发前端对信号进行放大、滤波、混频等操作,同时完成数模模数转换。
对于毫米波雷达而言,天线和毫米波收发前端工作在毫米波频段,是毫米波雷达系统的核心组件。其中,毫米波收发前端的发展的新趋势为高性能(高输出功率、高灵敏度、低功耗等)、大规模(相控阵、MIMO 阵列)和全集成。
毫米波雷达系统的关键性能指标,如检验测试范围、距离分辨率等,主要由天线和毫米波收发前端的性能所决定,例如天线的增益,收发前端的发射功率、接收灵敏度等。毫米波雷达接收到的回波功率可用式(1)进行计算:
毫米波频段覆盖了从 30~300 GHz 的范围,根据应用的不同,毫米波雷达选择的工作频段往往也不相同。频段的选择主要的考虑因素有:频谱规范、毫米波传播特性、所需分辨率、成本(芯片制造、封装等成本)等等。
目前汽车毫米波雷达有较为明确的频谱规范,世界主要国家和地区都将 77 GHz 的频点分配给汽车雷达使用,这中间还包括欧盟、美国、加拿大、日本、中国等等,频段或许略有不同。毫米波在空气中的传播特性随频率有较大变化,是频段选择的另一个依据。
例如,短距雷达可选择衰减较大的频点,以减少雷达之间的相互干扰。毫米波雷达手势检测 Soli 芯片的工作频点选在处于衰减峰值的 60 GHz。毫米波雷达的距离分辨率与带宽成反比,当需要较高距离分辨率时可选择更高的毫米波频段,以获得更高的可用带宽。
另外一个关键的频段选择依据为毫米波雷达的成本。频段越高的毫米波雷达芯片,对晶体管的截止频率要求也越高,从而需要更先进的工艺节点,成本也愈加昂贵。例如,65 nm 的 CMOS 工艺截止频率 Fmax 可到 300 GHz,足够用于设计工作在 60 GHz 或 77 GHz 的雷达前端电路。
若将工作频率提高到 140 GHz,那么使用 65 nm 工艺的设计难度将急剧提高。频率越高,封装的信号完整性要求越高,封装的成本也越高。毫米波雷达芯片最终的频段选择,需要在这一些因素中折中考虑。
常见的雷达测距原理有脉冲和调频连续波( FMCW)两种。在脉冲雷达中,雷达发射间歇性的脉冲信号,经过测量从目标返回的脉冲信号与发射信号之间的时间差即可计算出目标的距离。
而 FMCW 雷达发射频率随时间线性变化的连续波,通过发射波与反射波的频率差来计算出目标距离,其测距原理如图 3 所示。图 3 中画出了 FMCW 信号的瞬时频率与时间的关系,横轴为时间,纵轴为信号的频率,频率随时间呈三角波形。混频之后得到的中频频率代表了目标距离。设目标距离为 R,光速为 c,三角波的周期为 Tm,扫频带宽为 BW,则距离的计算公式为:

这两种机制各有优缺点。脉冲雷达间歇性工作,因而噪声小,可以检测到更微弱的信号,适合长距离的探测。由于发射信号的多普勒效应,脉冲雷达可以方便地计算出目标的瞬时速度。
FMCW 雷达使用频率来计算目标距离,多普勒效应和目标距离造成的频差混淆在一起,不易区分开。为客服这样的一个问题,FMCW 雷达需要发射多个不同斜率的连续波并对结果做处理,否则易产生虚假目标。
但是,对集成电路而言,测量时间差比测量频率差要困难很多,因此得到相同分辨率,脉冲雷达更贵。通常,由于瞬时发射功率过强而发射脉冲维持的时间等因素,脉冲雷达存在近距离盲区小于 50~100m,FMCW 雷达则无此问题。
脉冲雷达的功率峰均比大,而硅基有源器件击穿电压过低,难以达到脉冲雷达的瞬时功率要求。最后,FMCW 雷达的基带信号处理更容易,接收到的回波与发射波混频之后,中频频率在 1 MHz 的量级,对模数转换器(ADC)和数字基带的速度要求很低,可降低功耗和成本。上述这些特征使得硅基毫米波雷达更适合 FMCW 机制。
除了这两种常见的测距原理之外,还有调相连续波(PMCW)的原理。在 PMCW 雷达的发射端,基带产生低频的伪随机序列,与毫米波本振混频到毫米波频段;在接收端,将同一个伪随机序列延时,与下混频后的基带信号进行有关操作,当延时恰好等于电磁波到目标来回的传播时间时,相关操作输出的信号幅度最大,据此可计算出目标距离。多普勒频率的计算原理与脉冲雷达相似。
这种设计进一步简化了本振的设计,毫米波本振仅需要出示一个单频点的本振信号。但是接收端的中频频率远高于 FMCW 中的中频频率,对 ADC 速度要求更高。发射信号的调制速据率为 2 Gbps,因此中频带宽需高于 1 GHz, ADC 的采样率不少于 2 GSa/s。
FMCW 雷达的中频频率一般在数 MHz 的量级。PMCW 机制的另一个优点是伪随机码可轻易提供 MIMO 雷达阵列中所需的信号正交性,较容易扩展到 MIMO 阵列。MIMO 雷达芯片采用了 PMCW 的机制。
毫米波雷达的分辨率可分为距离分辨率和角度分辨率两个方面。距离分辨率指的是雷达所能辨认出的两个目标之间的最近距离。无论是脉冲还是 FMCW 测距机制,距离分辨率均与带宽成反比,可用式(3)进行计算:


其中,c 为真空中的光速,B 为雷达信号的带宽。相比于低频,毫米波频段有更高的可用带宽,因此能取得更好的距离分辨率,这是毫米波雷达的优势之一。例如,分配给远距前向汽车雷达的频带为 76~77 GHz,其对应的距离分辨率为 15 cm。
角度分辨率可用雷达天线主波束的半功率角度进行定义。角度分辨率与天线增益相关,波束越集中,天线增益越高,角度分辨率越高。当雷达进行波束扫描时,结合距离信息,雷达可绘出周围环境的 3 维图像,角度分辨率决定了这幅 3 维图像在 x-y 平面上的精度。
采用大口径和高增益的天线能够得到更好的角度分辨率。对于相控天线阵列而言,采用更多的阵列单元可提高角度分辨率。角度分辨率还与相控阵天线波束的指向角度有关。
相控阵每个天线单元都对应着一个发射或接收通道。功耗和硬件开销限制了硅基毫米波雷达的相控阵规模。144 通路相控阵实现了 6º的水平角分辨率和 5.8º的竖直角分辨率,功耗一共为 15 W, 144 通路由 6 块芯片组合而成。
针对这样的一个问题,研究人员提出了 MIMO 技术,使用虚拟阵列,可在不增加收发通道数目的情况下大幅度提高分辨率。在
在介绍了频段选择和测距原理之后,此节将对硅基毫米波雷达收发前端芯片技术进行综述。综述分为系统结构、关键模块电路技术和相控阵 3 个部分。关键电路技术涵盖了 FMCW信号发生器、功率放大器和宽带电路技术 3 部分内容。
一个基本的 FMCW 毫米波雷达收发前端芯片的系统结构如图 4 所示。首先,FMCW 信号发生器产生所需的毫米波 FMCW 信号,其参数由数字信号来控制。FMCW 信号发射器的结构有多种选择,将在下一节进行介绍。
在发射端,FMCW 信号送到功率放大器的输入端,经放大后驱动发射天线发射出去。在接收端,接收到的微弱信号回波首先经过低噪声放大器放大,然后与 FMCW 信号混频,混频得到的中频信号频率中包含着目标的距离信息。为了减轻对 ADC 带宽和动态范围的要求,一般中频信号要经模拟基带处理,模拟基带一般包含可编程功率放大器、低通滤波器等。
由于中频信号频率较低,一般在 MHz 的量级,采用交流耦合的成本高,多采用直流失调消除(DC Offset Cancellation, DCOC)反馈环路来压制基带的直流失调。ADC 转换为数字信号后进行数字雷达信号处理。
FMCW 信号发生器的主要性能指标有相位噪声,扫频线性度、带宽、速度等;发射机的主要指标有发射功率和效率,FMCW 雷达对发射机的线性度要求不高。接收机的主要性能指标有噪声系数、灵敏度、增益范围等等。
在基础结构之上还有一些更复杂的变体。采用倍频方案,将 FMCW 信号发生器的工作频率降低至原频率的 1/2 或 1/4,可提高噪声性能,减小 FMCW 信号分布网络的功耗;

FMCW 毫米波雷达前端芯片的一些关键模块电路,如 FMCW 信号发生器、功率放大器等,其性能直接决定了 FMCW 毫米波雷达的性能。同时,带宽是毫米波雷达的一个重要性能指标,毫米波雷达所能取得的距离分辨率和带宽成本反比。本节将对 FMCW 信号发生器、功率放大器以及硅基芯片宽带技术进行综述。FMCW 信号发生器
先通过基于查找表的直接数字综合器(Direct Digital Frequency Synthesizer, DDFS)产生一个低频(1.2 MHz)的 FMCW 信号,然后通过混频和整数型锁相环倍频,将信号频率扩展到毫米波频段。此种做法的主体问题在于 DDFS 的功耗较大,且精度有限。在输出的频谱中谐波成分丰富,不利于 FMCW 调频信号的线性度。

如图 5 所示,其中移除了功耗较大的 DDFS 模块,电路更为简洁,在功耗和精度上都得到了提高。在此种类型的 FMCW 信号发生器中,小数型锁相环的环路带宽是个关键参数,需平滑每个频率步长,又不至于使锯齿或三角波的瞬时频率失真。

图 6 给出了环路带宽过大的情况。FMCW 调制信号的周期、带宽等参数可很容易的通过 DSM 输入端来控制。加入额外功能,使 FMCW 调制信号扫频斜率伪随机化,作为每个雷达的识别标签,可减少相互干扰。

全数字锁相环产生毫米波 FMCW 信号的第 1 个难点是怎么样提高数字控制振荡器(Digital Controlled Oscillator, DCO)的频率分辨率。使用变压器进行电容缩放将 DCO 频率分辨率提高到了 1.64 MHz。使用 C-2C 级联网络对开关电容进行缩放,达到了 4Hz 的频率分辨率。
另一个难点是不同精度电容阵列之间的切换问题。为了覆盖 FMCW 的扫频范围,DCO 的电容一般会分为粗调、中调和细调几个阵列。
不同的阵列在切换时会造成 DCO 的频率增益波动,还有可能出现不单调的问题。利用了专门的校准算法处理这样的一个问题,校准之后芯片上的存储器保存粗调和中调每一组控制码对应的频率范围,确保不发生越界的情况。
FMCW 信号发生器也能够使用数模混合型锁相环来实现。数模混合型锁相环巧妙地调整了数字和模拟部分的位置,在传统全数字锁相环的 DAC 和 VCO 之间插入一级模拟积分器,采用片外电容实现,对 DAC 的输出进行积分,滤除 DAC 的量化噪声,解决了 DCO 的分辨率问题。
实现了另外一种基于数模混合型锁相环的 FMCW 信号发生器。其中,使用面积更小、功耗更下的 Bang-Bang 鉴相器代替了全数字锁相环中的时间数字转换器(TDC)。
处理 FMCW 信号发生器中的 1/f 噪声的技术方法,其从基于 ADC-TDC 的全数字锁相环出发,将 ADC 替换为连续时间带通 DSM 调制器,然后将 DSM 调制器的输出在数字域混频至 DC,对 DC 的噪声进行整型,将其推往高频后由锁相环的环路滤波器滤除掉。表 1 给出了 FMCW 信号发生器性能汇总。

功率放大器是毫米波雷达芯片不可或缺的模块。功率放大器主要的性能指标为线性度、带宽、效率和输出功率。FMCW 雷达的发射信号包络恒定,对功率放大器的线性度没有要求,因此不需要工作在功率回退区域。这点与毫米波无线通信中的功率放大器有很大不同。
在毫米波雷达芯片中,很少有功率放大器采用 Doherty、数字功率放大器、包络追踪等旨在提高回退效率的技术。理论上 FMCW 雷达芯片中可采用 D 类、E 类等非线性功率放大器以提高效率。在实际实现中,硅基晶体管在毫米波频段损耗大,缺乏这些非线性功率放大器所需的理想开关,因此大部分文献中还是采用 AB 类线性功率放大器。
在功率放大器的带宽方面,基于片上变压器的高阶匹配网络逐渐被认为是一种很有效的带宽扩展方法。宽带方面的详细的细节内容在此文下一节进行介绍。先进的硅基工艺电源电压和晶体管的击穿电压较低,例如,65 nm 的 CMOS 工艺电源电压为 1 V,这限制了传统功率放大器电路的饱和输出功率,一般小于 16 dBm。
有两种主要的技术可提高输出功率。其一是堆叠型功率放大器(Stack PA)。在堆叠型功率放大器中,将多个晶体管堆叠在一起,堆叠管栅端对于毫米波信号来说悬空,电源电压由多个晶体管均匀承担,因而可将电源电压提高,增大输出功率。
堆叠型功率放大器更适合 SOI 工艺, CMOS 工艺中,一方面无法减小堆叠管源端相对于衬底的电压,另一方面源端的对地寄生电容要在堆叠通路上引起电流相位改变,降低效率。堆叠型功率放大器采用 45 nm 的 SOI CMOS 工艺,峰值效率为 34%,饱和输出功率为 18.6 dBm。
采用 65 nm CMOS 工艺尝试了堆叠型功率放大器,输出功率有所提高,但不如 SOI 工艺明显,其在堆叠模式下的饱和输出功率为 17.6 dBm,峰值效率 20.4%。
第 2 种技术是功率合成。在每个子功率放大器输出功率有限的情况下,采用多路进行功率合成,理论上两路可提高输出功率 3 dB,四路可提高 6 dB。但功率合成网络会引入额外的插入损耗,文献中报道的值一般约 1 dB。功率合成网络即能够使用变压器、也可采用传输线。变压器型的功率合成网络更紧凑,可将子功率放大器的匹配网络、阻抗变换等融合在一起,提升整体性能。采用 40 nm 的 CMOS 工艺设计一个基于变压器的四路功率合成型功率放大器,饱和输出功率 20.9 dBm,峰值效率 22.3%,输出功率合成网络的损耗小于 1 dB,这代表了硅基片上变压器多路功率合成网络插入损耗的最优值。
但变压器功率合成芯片布局复杂,子功率放大器的输出晶体管到变压器端口的走线需要对称,这限制了变压器功率合成的规模。而传输线的功率合成网络可以走成二叉树的对称结构,对于 8 路以上的功率合成网络,传输线几乎是唯一的选择。
功率合成型放大器具备 16 个子功率放大器,采用零度传输线 GHz,饱和输出功率和峰值效率分别为 28.4 dBm 和 10%。效率方面,毫米波雷达的功率放大器可采用多模式,当目标距离较近时,切换为低输出功率模式已降低功耗。有必要注意一下的是,模式切换与 Doherty 等增强回退效率的技术不一样,模式切换对切换速度没有要求,因此较容易实现。


模式切换可通过改变偏置电压、关断部分子功率放大器来实现。创新地通过在堆叠型功率放大器和 Cascode 功率放大器之间切换来实现了模式的配置。合成性功率放大器结构如图 8 所示。功率放大器的性能对比如表 2 所示。

带宽是毫米波雷达芯片的一个重要指标,它直接决定了雷达所能达到的距离分辨率。除了汽车雷达这样给定可使用的频谱范围之外,大部分毫米波雷达芯片会采用一些宽带电路技术,尽可能的利用毫米波频段的宽可用带宽。毫米波雷达芯片前端一般都有多级电感匹配的放大级,因此一种可行的宽带技术是将各级的幅度峰值频率稍稍错开,这样拓展总增益的带宽。
但这样的做法存在一些问题。首先,将幅度峰值频率错开会牺牲整体增益;其次,由于工艺偏差等因素,每级的幅度峰值频率难以精确控制;
最后,对于功率放大器而言,其饱和输出功率由输出级主导,错开峰值频率这种做法不能扩展饱和状态下功率放大器的带宽。
目前在毫米波雷达芯片中最有潜力的宽带电路技术是使用片上变压器做宽带匹配网络。变压器的多个线圈重叠在一起,以与一个电感相当的面积,实现了一个高阶的电感电容网络,很适合用在毫米波雷达芯片的匹配网络之中。
而且,变压器还提供了很方便的直流偏置位置。由于片上变压器的这些优势,它吸引了大量相关研究。使用变压器实现了一个带宽为 57~66 GHz 的功率放大器芯片。直接用变压器,不加这个额外电容效果更好。

相控阵是毫米波雷达芯片中的一项重要技术。相控阵通过控制天线阵列各个接收通路的相移值,实现了天线波束的电扫描。相比于天线的机械扫描,相控阵摆脱了机械转动部件,在鲁棒性方面有很大提升,同时降低了成本。由于不同接收通路的信号相干叠加,而噪声不相干,具备 N 个接收通路的相控阵可提高信噪比 N 倍。

根据移相单元的位置不同,相控阵收发机的结构可以划分为本振移相、射频移相、基带移相,如图 11 所示。本振移相将移相通路放置在本振通路之上,本振与发射机接收芯片混频之后,等效为信号的相移。
一般本振信号的强度比接收到的射频信号要大,而且混频器电路的转换增益随本振幅度变化很小,因此移相器在本振通路上引入的噪声和损耗不会直接转换到信号通路之上。
与之相对,射频移相直接在混频器之前的射频信号通路插入移相器,移相器引入的噪声和损耗直接影响信噪比,设计时需对其进行补偿。但本振移相的布局较为复杂,芯片上需要集成多个混频器,同时有射频接收信号和本振信号两个毫米波信号在芯片上传输,时钟布局网络复杂。
因此本振移相的结构多使用在较小规模的相控阵之中,本振移相相控阵包含两个接收通路。射频移相布局简洁,移相器之后能够使用片上功率合成器直接进行功率合成,得到一路射频信号,再与本振信号混频。射频移相的结构同时还具备非常好的可扩展性。文献中规模较大的相控阵均采用射频移相的结构。
采用射频移相实现了高达 144 通路的相控阵芯片。基带移相的结构在文献中出现较少,与本振移相相同,它也需要多个混频器以及复杂的时钟馈线网络。将移相功能放在数字基带具备最好的灵活度,但这样的做法需要集成多路 ADC,当基带频率较高时会明显提高功耗和芯片面积代价。
MIMO 阵列技术很好的突破了这种限制,它同时使用虚拟阵列,减少了实际所需的收发通路数目,降低了系统成本。
键合线封装大量应用于低频模拟射频电路的封装之中,其成本低廉、技术难度小,可认为是迄今为止使用最广泛的封装技术。在毫米波频段,键合线会引入较大的寄生电感,有损信号完整性,限制了键合线封装在毫米波雷达封装中的应用。
为了减少键合线的寄生电感,可将 PCB 挖了一个坑,将芯片放置在坑中,减小芯片和 PCB 的高度差。采用多根键合线并联一样能减小寄生电感,但是由于键合线之间的互感,电感量的减小比例与线的根数不成比例。
通过将芯片上的传输线与键合线协同设计,并用了大量的接地键合线以减小寄生电感,最终将键合线的带宽提高到了单根键合线 GHz 的范围内插入损耗小于 3.0 dB,这样的做法的局限是需要长的地线焊盘,牺牲了芯片面积,同时还需要对键合线长度进行较为精确的控制,如图 13 所示,给出了 4 种键合的带宽测试结果。

使用键合线 dBi 的天线增益,收发机的工作距离为 14 mm,如图 14。总而言之,由于性能限制,键合线技术在毫米波雷达中使用较少。

第 2 种封装方式为倒封装。图 15 给出了倒封装的示意图。现今倒封装已经是一种相当成熟的技术。相比于键合线,倒封装的性能更好,典型的倒封装焊球引入的电感在 20~30 pH 的量级,这对毫米波信号尚在可容忍范围内,对信号完整性和匹配影响并不大。倒封装的另一个优势是芯片上焊盘位置可相对自由的分布,不必局限于芯片四边,这样做才能够避免不必要的走线,且单位面积的焊盘密度也更大。

图 15(b)给出了采用 25 mm 焊球的倒封装反射系数测试结果,能够正常的看到,到 100 GHz 的范围内,倒封装都能实现很好的匹配。一般毫米波雷达芯片上都会使用大量的电感、传输线与变压器等无源器件,封装有可能在片上无源器件上方覆盖一层封装金属。这层金属可能会改变无源器件的特性,在芯片设计中需预先将其考虑在内。
封装天线指的是将天线和芯片一同集成在封装内,如图 16 所示。封装天线很好地兼顾了封装成本、体积和性能。毫米波信号直接在封装内部完成从芯片向天线的转换,避免了毫米波信号进入 PCB 板,以此来降低了对 PCB 的要求,减低 PCB 板的设计制作成本。

同时,电源、低速信号依然通过封装从 PCB 引出,减小封装体积。封装天线在毫米波雷达方面具备大的潜力。封装天线,封装上集成了一个长度为 1.65 mm 的差分馈线双极化天线 dBi, H 平面和 E 平面的半功率角分别为±45º和±60º。


据外媒报道,日本庆应义塾大学(Keio University)与日本信息通信研究机构(NICT)的研究人员开发了新的太赫兹波雷达设计。该设计基于漏波相干层析成像技术,可能有助于解决现有波雷达的一些局限性。 (图片来自: 过去几年里,随只能和无人驾驶汽车的发展,雷达,尤其是毫米波雷达的应用明显地增加。通常,雷达的距离分辨率和角分辨率通常会受到自身带宽和波长的限制。 与毫米波相比,太赫兹波频率更高,波长更短,有助于开发外型更小、分辨率更高的雷达系统。然而,随着波长变短,波衍射引起的衰减会迅速增加。 补偿这种衰减的方法之一是在形成定向波束的同时发射波。尽管半导体技术的新发展已经使太赫兹振
雷达系统通常与飞机等军事项目有关,但是它们如今已迅速进入包括商用汽车在内的民用领域。作为高级驾驶员辅助系统(ADAS)电子设备的一部分,毫米波(mmWave)雷达系统正在集成到新车辆中,以提供更安全的驾驶体验。完全无人驾驶的“无人驾驶”汽车可能还有数年之遥,而盲点检测和避免碰撞等ADAS功能现在可保护驾驶员。低功率,高频雷达检测对于实现所有目标检测至关重要,最终可以创造更安全的驾驶体验。 毫米波雷达技术,激光雷达技术和摄像头,是提高ADAS功能的三项重要传感器技术。汽车雷达频率主要依然集中在24 GHz,但是77 GHz才是如今各大厂商着重关注的技术。正在推出基于毫米波频率上的调频连续波(FMCW)雷达集成电路(IC)。雷
代表产品解析 /
一、实验目的 1、了解D/ A转换与单片机的接口方法。 2、了解D/ A转换芯片0832的性能及编程方法。 3、了解单片机系统中利用D/ A转换芯片产生各种波形信号的基本方法。 二、实验内容 1.实验原理图: 2、实验内容 利用0832输出一个从-5V开始逐渐升到0V再逐渐升至5V,再从5V逐渐降至0V,再降至-5V的锯齿波电压。 三、程序 程序清单: ORG 0740H HA6S: MOV SP,#53H HA6S1: MOV R6,#00H HA6S2: MOV DPTR,#8000H MOV A,R6 MOVX @DPT
是德科技公司(Keysight Technologies, Inc)宣布推出全新的 N5193A UXG 捷变频信号发生器。这款现货供应的仪器适用于在航空航天与国防应用中高度真实且可扩展地仿真各类威胁。此外,UXG 还支持滑入式安装方法,能可靠地替代大型精密仿真系统中通常使用的传统快速切换本地振荡器(LO)。 借助直接数字合成技术和是德科技专有的数模转换器,UXG 能够在最短 250 ns 的时间内快速切换频率、幅度和相位设置,并且内置有相位可重复性功能。 UXG 可生成具有 1 ns 上升时间/下降时间和 80 dB 通断比的 5 ns 窄脉冲,以仿真先进雷达信号。它还可生成带宽为载波频率 10% 至 25% 的线性调频。其可
2011年2月18日,新泽西州沃伦讯 —— ANADIGICS, Inc.(纳斯达克股票代码:ANAD)今日宣布推出新型功率放大器 (PA),适用于 WiMAX 用户端设备 (CPE) 及Femtocell,再度率先提供 WiMAX 通信设施适用最优的功率放大器。ANADIGICS 新型的 AWB7230是完全匹配﹑多芯片模块 (MCM) 的设计,能够在所有 3.5 GHz WiMAX 频带发挥网络效能。 AWB7230 可满足 WiMAX 频谱模板的要求,提供绝佳的线性RF功率,并且可作为 CPE 或Femtocell的传输链中最后级的功率放大器。该器件覆盖整个 3.3 GHz 至 3.8 GHz 的频带,支持全世界的
【ANADIGICS】 /
摘要: PA34是APEX公司新推出的大功率运算放大器,它具有输入共模范围宽、电源电压范围大、效率高、失真小等特点,可用来完成音响功放以及半桥式全桥电机的驱动。文中介绍了PA34的特点、性能以及在双向电机驱动电路中的应用。给出了利用PA34设计的双向电机驱动电路。同时指出了安装PA34时应当注意的几点注意事项。 关键词: PA34 SOA 双向电机驱动 1 概述 PA34是APEX公司推出的7脚TO220封装的大功率运算放器,它的输入共模范围很宽,且内含输出限流保护功能,同时具有很宽的电源电压范围。其中单电源时电源电压范围5V~40V;双电源时电源电压范围为±2.5V~±20V。PA34的
负阻放大器,除了在一些特别的场合,第一个用于音响上并取得成功的是YAMAHA,其主要的作用是对低频的延伸有很好的改善作用,但是对200Hz以上的频率却会起到劣化音质的效果,所以一般是用在超低频有源音箱上。 实际上,这种电路是和音箱搭配使用的,单独没什么实际使用的意义。其工作原理是:如果音箱是一个刚体,那么加上一个管子,就可以变成一个理想的霍尔莫滋共鸣箱,那么不管这箱子大小如何,管子的粗细怎样,只要符合霍尔莫滋共振计算公式。哪怕20Hz的谐振点也可以做的到,箱子的大小,只是效率高低而已,由于音箱上有喇叭的存在,喇叭在发声的时候是在运动的,音箱就不是一个刚体,那么箱子就不会产生霍尔莫滋共鸣。因此,如果在发声的时候喇叭的振膜是静止
一、仪器型号 是德/安捷伦E4428C信号发生器 故障现象 报错210.256.315.514;相噪差。 UNLEVEL报错 检验测试过程 按照每个客户描述故障,开始做检测,拆机后发现仪器源模块损坏严重,所以造成输出异常故障。 维修过程 确认故障后,工程师更换源模块损坏组件,整机调整检验测试仪器。 五、维修结果 故障现象消失,仪器修复完成。 射频仪器使用需要注意的几点: 1、对仪器的各项指标要清楚了解,使用时候要做到心中有数,规范操作,避免各种超过额定限制的输入输出操作。 2、注意输出阻抗的匹配,避免过载。 3、注意信号反灌:输出端不能输入信号。高频信号输出时,禁止输出端开路。 4、做好静电防护,防止静电损坏。
自检报错故障维修 /
直播回放: 贝能国际推出基于英飞凌技术的毫米波雷达模组,完美解决PIR市场痛点
ADI世健工业嘉年华——深度体验:ADI伺服电机控制方案
解锁【W5500-EVB-Pico】,探秘以太网底层,得捷电子Follow me第4期来袭!
智能驾驶技术的一直在升级,不光把安全性将至少提高一个数量级,也成为下一代智能电动汽车的核心卖点。作为智能驾驶系统的核心,智能驾驶芯片 ...
近日,中微半导体(深圳)股份有限公司(以下简称:中微半导股票代码:688380)宣布推出BAT32A系列车规级SoC芯片BAT32A6300。该芯片提 ...
汽车产业正在被人工智能技术重构。如同蒸汽机之于工业革命的意义,智能驾驶慢慢的变成了人类社会自发明汽车以来的一大颠覆性创新,持续推动汽车 ...
最近,国内一家氮化镓公司实现市场应用新突破。12月29日,致能科技宣布,他们与合作伙伴共同完成了基于氮化镓(GaN)技术的大功率无线充电 ...
汽车传感器是把非电信号转换成电信号并向汽车传递各种工况信息的装置。在无人驾驶的层级结构中,汽车传感器处于感知层,产品附加值高, 是 ...
大联大品佳集团推出基于Infineon产品的3.3KW高功率密度双向相移全桥方案
阅读并了解 TE Connectivity 无创想,不奇迹 精彩专题,答题有礼!
底盘电子车身电子信息及娱乐系统安全总线与连接车用传感器/MCU检测与维修其他技术行业动态词云: